Scaling and orientation with substrata
This tutorial walks through scaling and orienting 3D point clouds with substrata. You will load a point cloud, compute or set scale, determine an up vector and depth offset, apply transforms, and visualize results.
from substrata import *
/home/pbongaerts/miniconda3/envs/substrata/lib/python3.10/site-packages/tqdm_joblib/__init__.py:4: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from tqdm.autonotebook import tqdm
Loading a point cloud
Substrata lets you load full-size point clouds or stream‑decimate them during load (to reduce memory use and speed up computations when full resolution isn’t required). Often it’s helpful to generate a separate decimated PLY (using pointclouds.decimate_ply_file() or the substrata decimate CLI). By convention we append the postfix _dec50M (for a 50M‑point decimated version) to the original PLY filename.
pcd = PointCloud("/mnt/sdd/tonga_focal/ton_tof/ton_tof_40m/ton_tof_40m_20241008/ton_tof_40m_20241008_dec50M.ply",
max_points=50000000)
Read/Sample: 100%|██████████| 50000000/50000000 [00:02<00:00, 20109540.63vtx/s]
When PLYs are exported in Metashape’s local chunk coordinate system, the point cloud is neither scaled nor oriented, so orientation and scale are arbitrary.
print(pcd)
fig = pcd.plot()
PointCloud(name='ton_tof_40m_20241008', path='/mnt/sdd/tonga_focal/ton_tof/ton_tof_40m/ton_tof_40m_20241008/ton_tof_40m_20241008_dec50M.ply')
- points: 50,000,000
- colors: yes
- normals: yes
- bounding_box: [min=(-28.490, -49.371, -35.401), max=(21.888, 61.355, 8.889), extent=(50.379, 110.726, 44.291)]
- world_transform: identity
- world_transform_matrix:
1.000000 0.000000 0.000000 0.000000
0.000000 1.000000 0.000000 0.000000
0.000000 0.000000 1.000000 0.000000
0.000000 0.000000 0.000000 1.000000
- transforms_applied: 0
Scaling the point cloud
To scale the point cloud, load marker coordinates for scalebar targets, define the scalebars, compute the scale factor, and apply it as a 4×4 transform.
# Defining the scalebars
SCALEBAR_SIZES_IN_CM = [["target 31", "target 33", 0.20], # top-left
["target 35", "target 37", 0.20], # bot-left
["target 39", "target 41", 0.20], # top-right
["target 43", "target 45", 0.20]] # bot-right
# Load the marker coordinates as an Annotations object and then define the scalebars
markers = Annotations("/mnt/sdd/tonga_focal/ton_tof/ton_tof_40m/ton_tof_40m_20241008/ton_tof_40m_20241008_markers.csv")
scalebars = Scalebars(SCALEBAR_SIZES_IN_CM, markers)
print(scalebars)
Scalebars(
num_scalebars=4,
scalebar_1='target 31'-'target 33' (0.2m) [partial_coords],
scalebar_2='target 35'-'target 37' (0.2m) [dist=0.1997, residual=-0.0003],
scalebar_3='target 39'-'target 41' (0.2m) [dist=0.2002, residual=+0.0002],
scalebar_4='target 43'-'target 45' (0.2m) [dist=0.2000, residual=+0.0000],
calculated_scalefactor=0.272874,
variance=0.0000000741,
std_error=0.0001571586,
valid_scalebars=3
)
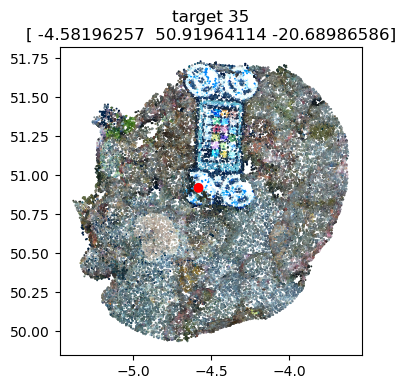
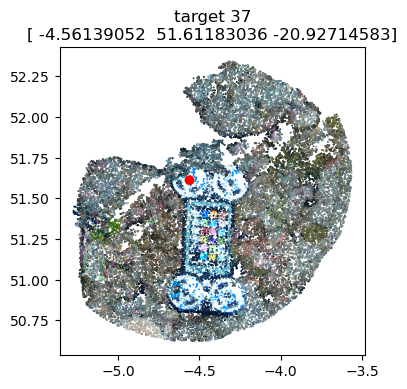
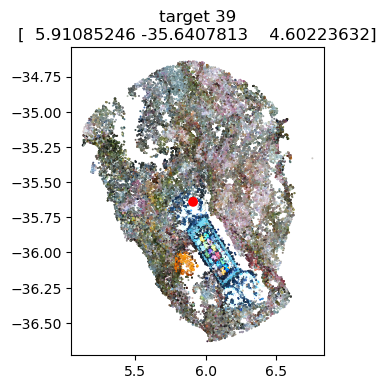
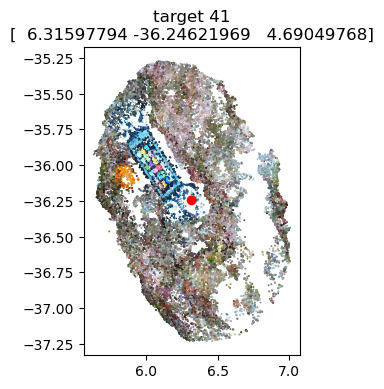
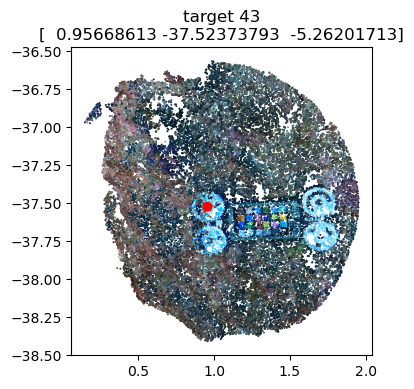
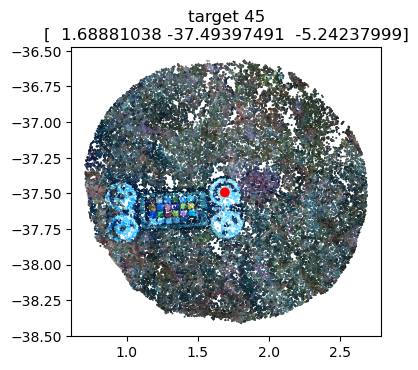
# Optional: Visualize the marker coordinates on the scalebars to ensure accurate positioning
scalebars.show(pcd) # needs the pointcloud as argument
Number of scalebars: 3
Scale factor: 0.27287
Variance: 0.0000000741
Std Error: 0.0001571586
/home/pbongaerts/Github/substrata/src/substrata/annotations.py:1348: UserWarning: FigureCanvasAgg is non-interactive, and thus cannot be shown
fig.show()
[<Figure size 400x400 with 1 Axes>,
<Figure size 400x400 with 1 Axes>,
<Figure size 400x400 with 1 Axes>,
<Figure size 400x400 with 1 Axes>,
<Figure size 400x400 with 1 Axes>,
<Figure size 400x400 with 1 Axes>]
# Apply the scale factor to the pointcloud and visualize to assess
pcd.apply_transform(Transform.from_scale(scalebars.scalefactor))
fig = visualizations.plot_2d(pcd)
Orientation
Depending on your analysis, it’s often useful to orient the point cloud so depth aligns with the z‑axis. You can either (1) directly specify an up vector or (2) determine the up vector by regressing camera 3D positions (Cameras object) or a set of markers (Annotations object) against their known depths.
To use camera positions, load camera metadata into a Cameras object by providing paths to a .meta.json file (generated via the Agisoft Metashape API with camera path/center/transform) and a .cams.xml file (exported in Agisoft Metashape using chunk.exportCameras("output_file.cams.xml")).
cams = Cameras("/mnt/sdd/tonga_focal/ton_tof/ton_tof_40m/ton_tof_40m_20241008/ton_tof_40m_20241008.meta.json",
"/mnt/sdd/tonga_focal/ton_tof/ton_tof_40m/ton_tof_40m_20241008/ton_tof_40m_20241008.cams.xml")
print(cams)
Cameras(
count=1735, sensors=2, enabled=676,
with_coords=1735, with_datetime=0, with_depth_sensor_m=1059,
world_transform=identity,
groups=['auv_PR', 'photos_PGRAM01'],
groups_counts={'photos_PGRAM01': 676, 'auv_PR': 1059},
coords_bounds=[min=(-18.006, -48.584, -18.032), max=(13.989, 59.819, 19.135), extent=(31.995, 108.402, 37.167)]
)
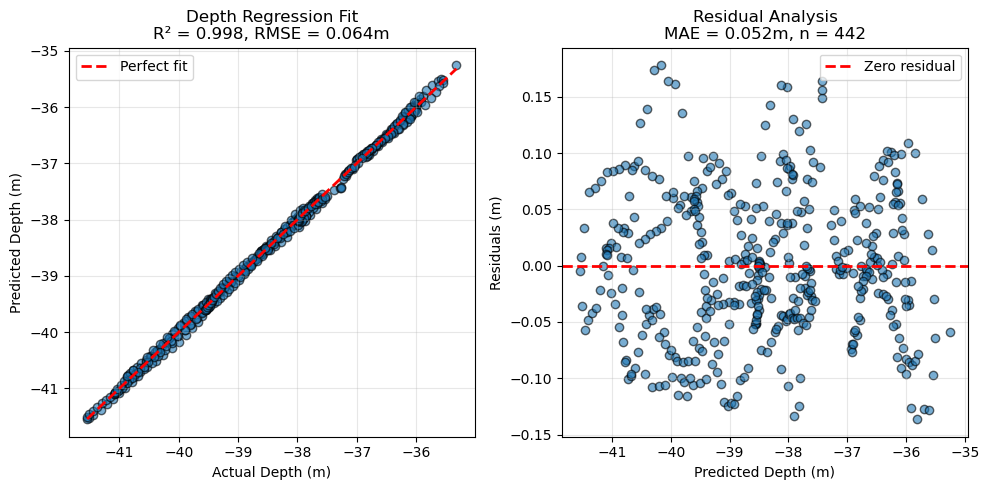
If a sufficient number of cameras have measured depth (depth_sensor_m, obtained from synchronized sensor data), you can derive the up vector—the 3D direction in the cloud most correlated with depth—and the depth offset (to align the z‑axis approximately with depth) as follows:
up_vector, depth_offset, depth_per_unit, *_ = (cams.get_up_vector_from_camera_depths(plot=True)
)
Found 442 matching cameras/depths for regression
Up vector: [0.008332715344911996, 0.06360581525863027, 0.26619189796023607]
Depth offset: -38.6090 m
Depth per unit: 0.2738 m
Mean squared error: 0.0042 m²
Root mean squared error: 0.0645 m
Mean absolute error: 0.0524 m
R²: 0.9983
Number of matches: 442
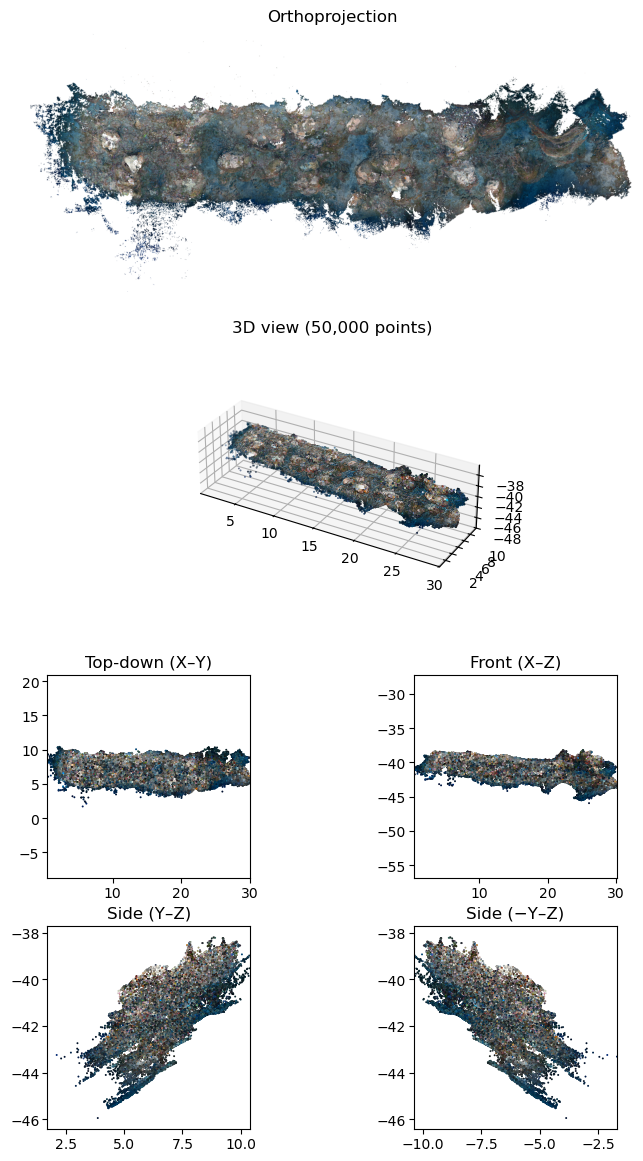
Apply these parameters to orient the point cloud with pcd.apply_transform(Transform.from_up_vector(up_vector)) followed by pcd.apply_transform(Transform.from_depth_offset(depth_offset)). For convenience, pcd.apply_orientation_transforms performs scaling, z‑axis alignment, depth offset, and additional transforms (e.g., aligning the widest dimension to the x‑axis and ensuring +y is upslope).
Afterward, plot the different views as a quick check that scaling/orientation were applied correctly.
pcd.apply_orientation_transforms(scale_factor=1.0, # skipping scale as already applied in this case
up_vector=up_vector,
depth_offset=depth_offset,
depth_scale_factor=depth_per_unit)
fig = pcd.plot_views()
The transform used for orientation should also be applied to any other objects used with the point cloud (e.g., Cameras, Annotations). Apply the cumulative world_transform using the generic apply_transform method.
print(pcd)
cams.apply_transform(pcd.world_transform)
print('Camera world_transform:\n', cams.world_transform)
PointCloud(name='ton_tof_40m_20241008', path='/mnt/sdd/tonga_focal/ton_tof/ton_tof_40m/ton_tof_40m_20241008/ton_tof_40m_20241008_dec50M.ply')
- points: 50,000,000
- colors: yes
- normals: yes
- bounding_box: [min=(0.000, 0.000, -46.147), max=(30.331, 13.227, -37.099), extent=(30.331, 13.227, 9.048)]
- world_transform: non-identity
- world_transform_matrix:
0.014947 -0.265110 0.062879 17.627868
0.272338 0.012618 -0.011540 6.871499
0.008304 0.063388 0.265280 -38.608986
0.000000 0.000000 0.000000 1.000000
- transforms_applied: 7
Camera world_transform:
[[ 1.49472062e-02 -2.65109654e-01 6.28793175e-02 1.76278683e+01]
[ 2.72337985e-01 1.26176500e-02 -1.15400613e-02 6.87149939e+00]
[ 8.30416371e-03 6.33878731e-02 2.65279805e-01 -3.86089862e+01]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
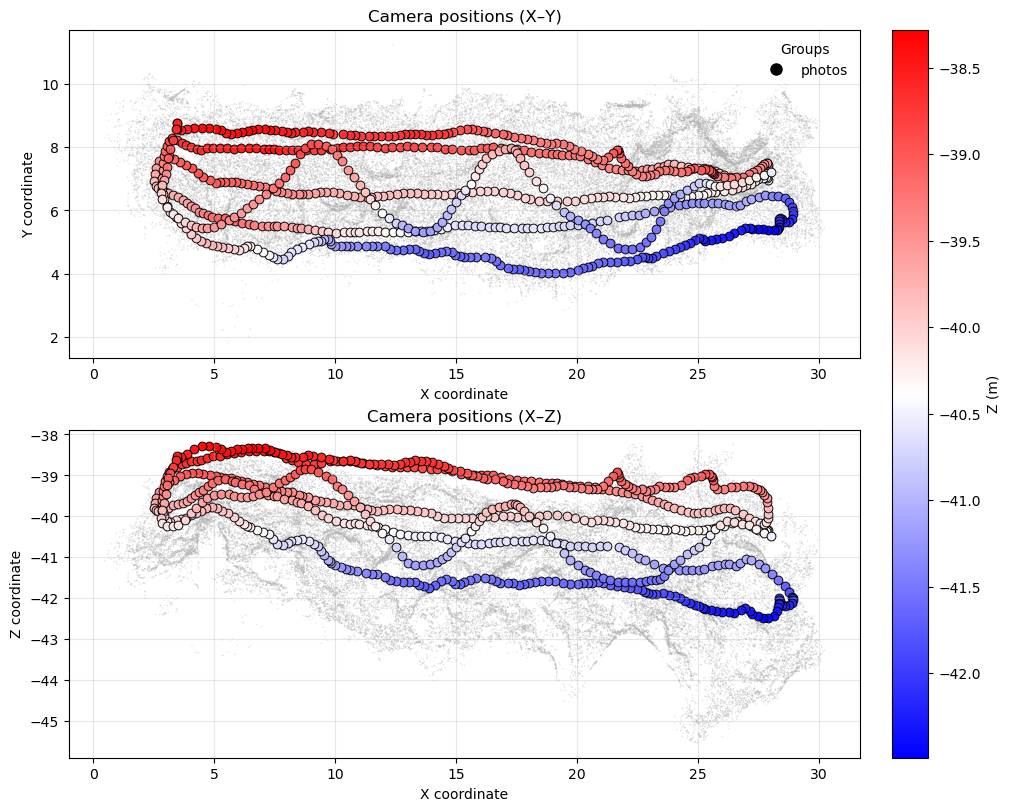
You can visualize camera positions within the point cloud:
cams.show(pcd)
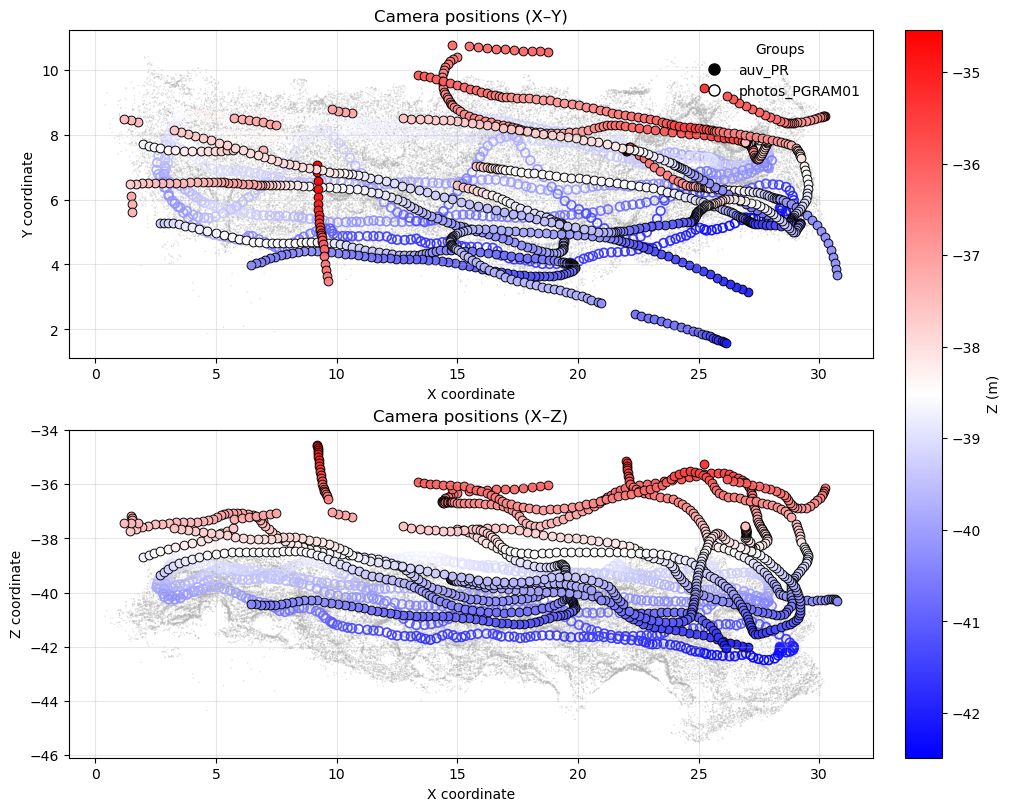
cams.group("photos_PGRAM01").show(pcd) # or only a specific camera group
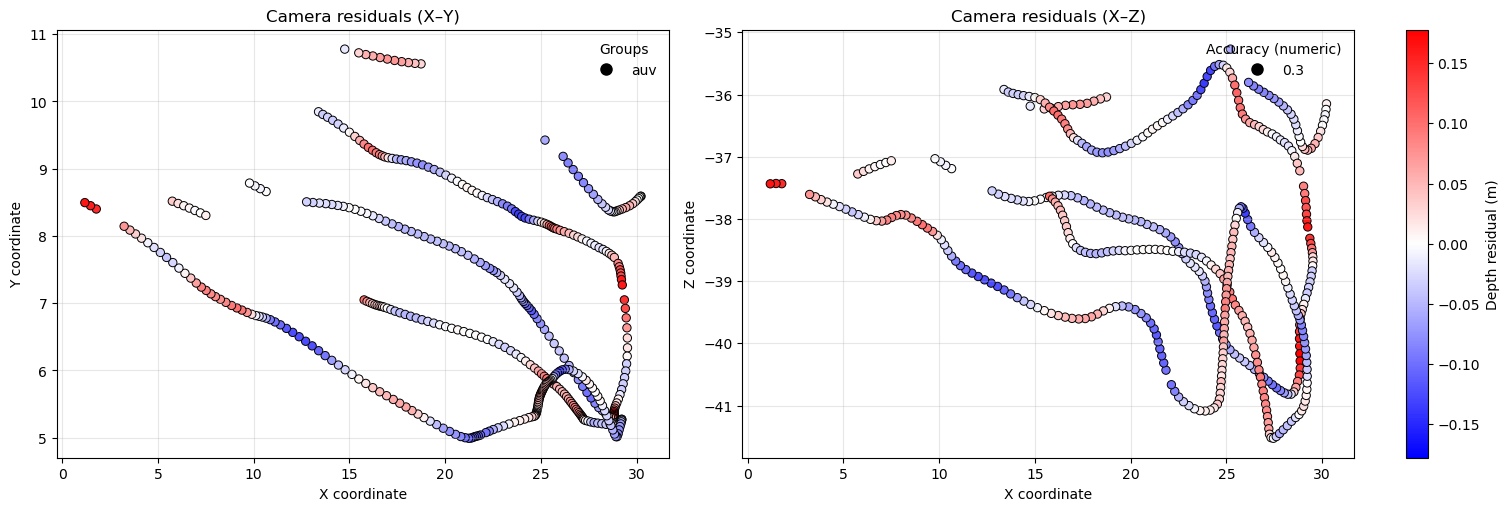
Plot camera depth residuals (for cameras with depth_sensor_m) to check for bias:
cams.show_z_vs_depth_residuals()
(<Figure size 1500x500 with 2 Axes>, <Figure size 1500x500 with 3 Axes>)
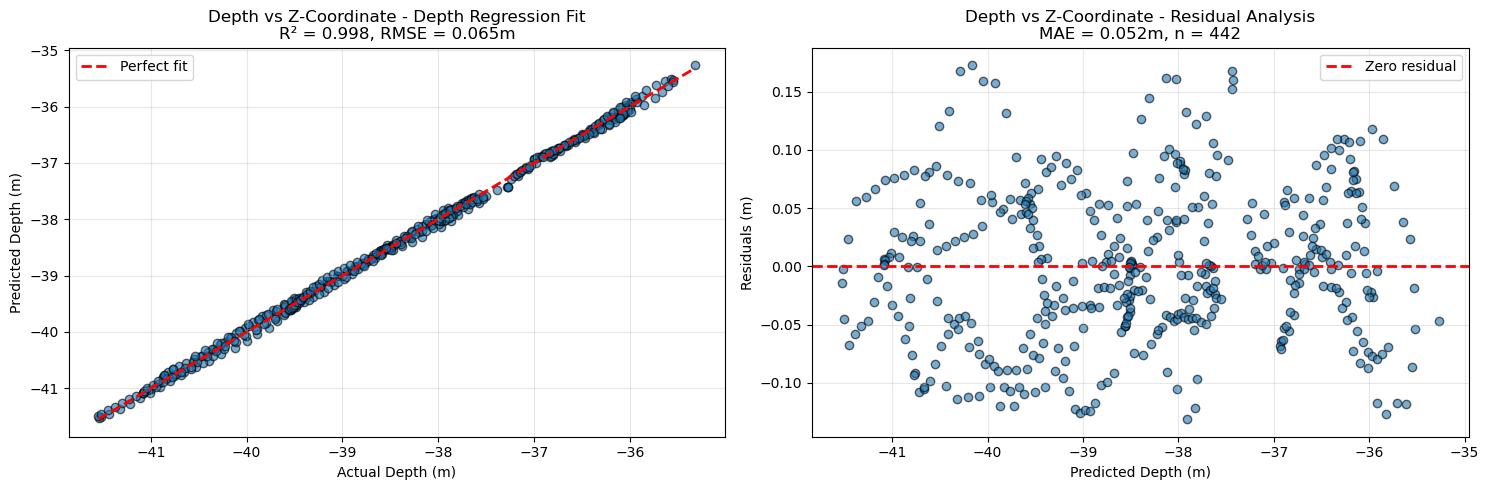
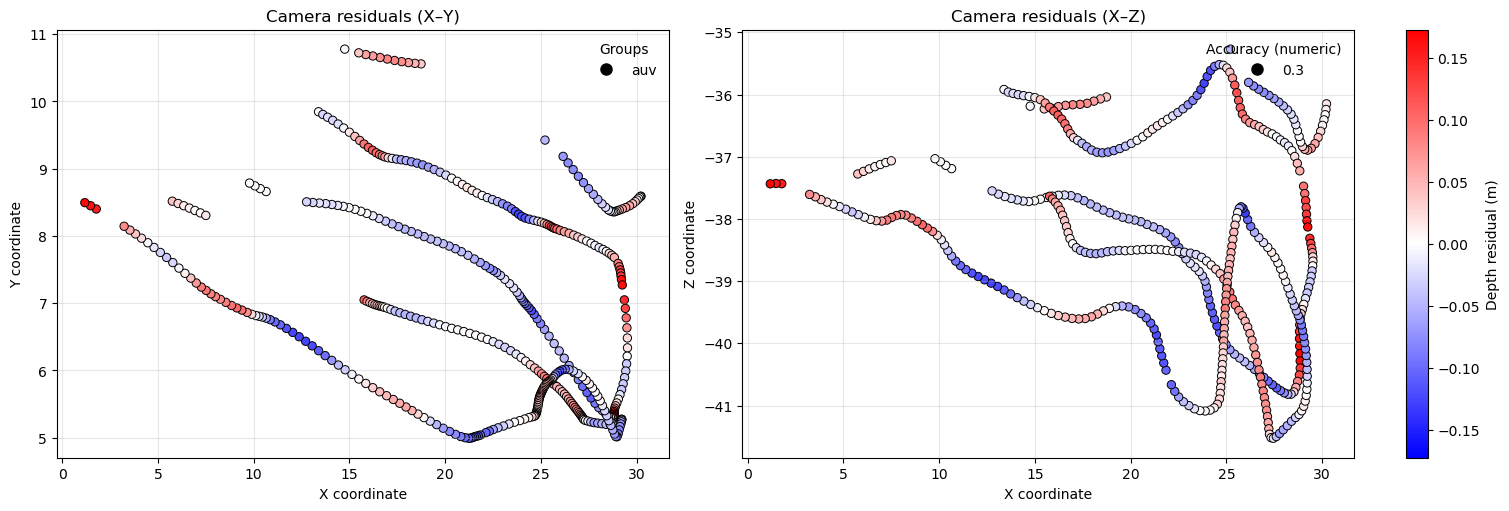
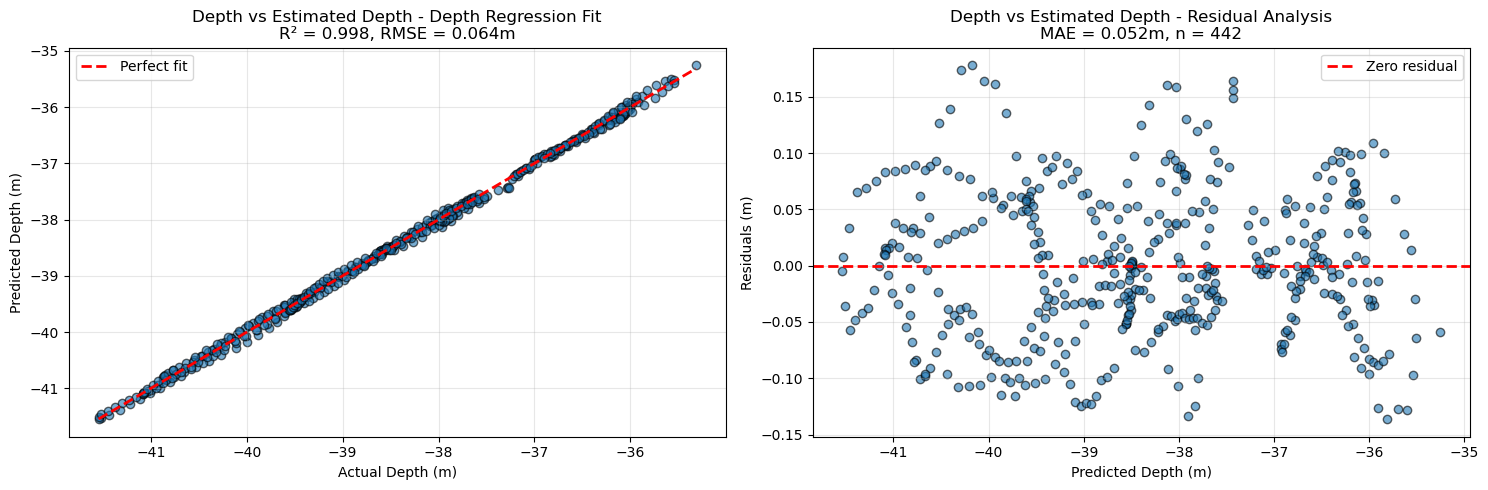
Often scale_factor and depth_per_unit (scaling along the z‑axis) differ slightly. Applying a global scale_factor therefore makes z values only an approximate depth. For absolute depth at a camera, use the depth_in_m property. After assigning up_vector and depth_offset to Cameras, you can also plot residuals versus estimated absolute depth.
cams.depth_offset, cams.up_vector, cams.depth_per_unit = depth_offset, up_vector, depth_per_unit
cams.show_depth_vs_est_depth_residuals()
(<Figure size 1500x500 with 2 Axes>, <Figure size 1500x500 with 3 Axes>)