Topographic position index (TPI) and terrain ruggedness index (TRI)
%load_ext autoreload
%autoreload 2
import os
from substrata import *
Load in the pointcloud and annotations and scale/orient using predefined saved world transform
annotations_path = '/home/pimbongaerts/Github/substrata/sandbox/mcav_sint/annotations/'
output_path = '/home/pimbongaerts/Github/substrata/sandbox/mcav_sint/output/'
def load_plot_and_annotations(plot_path, annotations_path):
plot = ProjectInitializer(path = plot_path)
plot.reset_paths_to_local(plot_path) # not required when running on server
plot.annotations_filepath = annotations_path
plot.initialize()
return plot
# Example execution
plot = load_plot_and_annotations('/mnt/sdd/curacao_focal/cur_kal_40m_20200214/',
os.path.join(annotations_path, 'cur_kal_40m_ann.csv'))
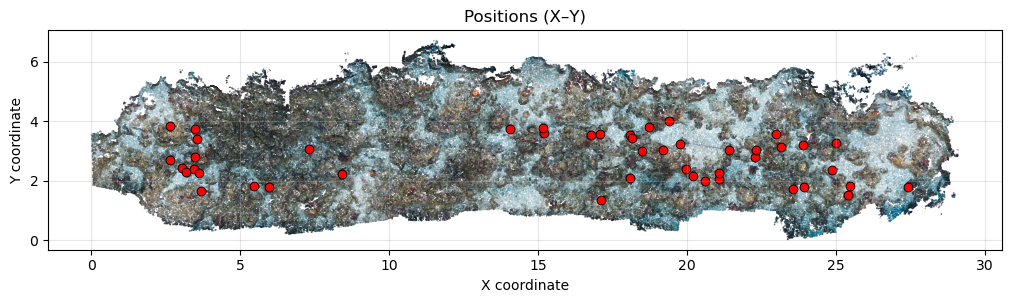
# Visualize annotations
plot.annotations.show(plot.pcd, color=True)
Loading project from YAML file: /mnt/sdd/curacao_focal/cur_kal_40m_20200214/cur_kal_40m_20200214.yaml
Loading pointcloud from /mnt/sdd/curacao_focal/cur_kal_40m_20200214/cur_kal_40m_20200214_dec50M.ply
Loading cameras from /mnt/sdd/curacao_focal/cur_kal_40m_20200214/cur_kal_40m_20200214.meta.json and /mnt/sdd/curacao_focal/cur_kal_40m_20200214/cur_kal_40m_20200214.cams.xml
Loading markers from /mnt/sdd/curacao_focal/cur_kal_40m_20200214/cur_kal_40m_20200214_markers.csv
Loading annotations from /home/pimbongaerts/Github/substrata/sandbox/mcav_sint/annotations/cur_kal_40m_ann.csv
Applying world_transform to loaded objects:
[[ 6.91815870e-03 8.81985760e-02 -5.38114188e-02 1.49175200e+01]
[-8.74792065e-02 -2.36954925e-02 -5.00842348e-02 2.53525065e+00]
[-5.49731391e-02 4.88062839e-02 7.29274924e-02 -3.88472494e+01]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
Prepare for measurements and visualizations
# Load previously determined SA measurements
plot.annotations.load_measurements_from_csv("/home/pbongaerts/Github/substrata/sandbox/mcav_sint/annotations/all_SAs_clean.csv", id_column="sample_name")
# Correct camera path
plot.cams.set_filepath_replace("/home/deepcat/mounts/deepseal/coral3d/focal_plots/cur_kal/cur_kal_40m/",
"/mnt/sdd/curacao_focal/")
# Create buffered ortho to visualize annotation positions
ortho = OrthoMap(plot.pcd, pixel_width = 5000)
The following CSV IDs had no matching annotation (skipped): MCCPKA05G0469_purple, MCCPKA05G0471_green, MCCPKA05G0473_green, MCCPKA05G0474_green, MCCPKA05G0475_green, MCCPKA10G0476_blue, MCCPKA10G0477_blue, MCCPKA10G0480_blue, MCCPKA10G0481_blue, MCCPKA10G0482_blue, MCCPKA10G0487_blue, MCCPKA10G0491_green, MCCPKA10G0493_green, MCCPKA10G0494_blue, MCCPKA10G0495_green, MCCPKA10G0497_green, MCCPKA10G0498_green, MCCPKA10G0499_blue, MCCPKA10G0500_blue, MCCPKA10G0501_green, MCCPKA10G0502_green, MCCPKA10G0503_blue, MCCPKA10G0505_blue, MCCPKA20G0292_green, MCCPKA20G0293_blue, MCCPKA20G0311_blue, MCCPKA20G0312_blue, MCCPKA20G0315_blue, MCCPKA20G0318_green, MCCPKA20G0321_green, MCCPKA20G0329_blue, MCCPKA20G0330_blue, MCCPKA20G0334_blue, MCCPKA20G0386_blue, MCCPKA20G0388_green, MCCPKA20G0390_blue, MCCPKA20G0394_blue, MCCPKA20G0395_blue, MCCPKA20G0396_blue, MCCPKA20G0398_blue, MCCPKA20G0399_blue, MCCPKA20G0400_blue, MCCPKA20G0404_blue, MCCPKA20G0405_green, MCCPKA20G0406_blue, MCCPKA20G0507_blue, MCCPKA60G0241_purple, MCCPKA60G0250_purple, MCCPKA60G0260_purple, MCCPKA60G0423_purple, MCCPKA60G0425_purple, MCCPKA60G0426_purple, MCCPKA60G0427_purple, MCCPKA60G0428_purple, MCCPKA60G0429_purple, MCCPKA60G0430_purple, MCCPKA60G0431_green, MCCSNA10G0052_green, MCCSNA10G0054_green, MCCSNA10G0055_green, MCCSNA10G0056_blue, MCCSNA10G0125_green, MCCSNA10G0126_green, MCCSNA10G0129_green, MCCSNA20G0132_green, MCCSNA20G0133_green, MCCSNA20G0134_blue, MCCSNA20G0135_blue, MCCSNA20G0137_blue, MCCSNA20D0138_blue, MCCSNA20G0139_green, MCCSNA20D0140_green, MCCSNA40G0029_blue, MCCSNA40G0030_purple, MCCSNA40G0031_green, MCCSNA40G0032_purple, MCCSNA40G0071_purple, MCCSNA40G0073_blue, MCCSNA40G0074_blue, MCCSNA40G0075_blue, MCCSNA40G0076_purple, MCCSNA40G0078_purple, MCCSNA40G0079_blue, MCCSNA40G0143_blue, MCCSNA40G0145_blue, MCCSNA40G0146_purple, MCCSNA40G0147_blue, MCCSNA40G0148_purple, MCCSNA40G0150_green, MCCSNA40G0151_green, MCCSNA40G0152_blue, MCCSNA60G0080_purple, MCCSNA60G0081_purple, MCCSNA60G0082_purple, MCCSNA60G0083_purple, MCCSNA60G0153_purple, MCCSNA60D0159_purple, SICPKA10G0438_yellow, SICPKA10G0439_yellow, SICPKA10G0440_orange, SICPKA10G0441_orange, SICPKA10G0442_pink, SICPKA10G0443_yellow, SICPKA10G0444_yellow, SICPKA10G0445_orange, SICPKA10G0446_pink, SICPKA10G0447_yellow, SICPKA10G0450_yellow, SICPKA10G0451_orange, SICPKA10G0452_orange, SICPKA10G0453_pink, SICPKA10G0454_yellow, SICPKA10G0455_pink, SICPKA10G0456_yellow, SICPKA10G0457_orange, SICPKA10G0461_orange, SICPKA10G0462_yellow, SICPKA10G0463_orange, SICPKA10G0464_yellow, SICPKA10G0465_orange, SICPKA10G0466_orange, SICPKA10G0467_orange, SICPKA20G0294_orange, SICPKA20G0297_pink, SICPKA20G0298_orange, SICPKA20G0301_pink, SICPKA20G0302_yellow, SICPKA20G0307_yellow, SICPKA20G0317_yellow, SICPKA20G0320_pink, SICPKA20G0328_pink, SICPKA20G0333_orange, SICPKA20G0335_orange, SICPKA20G0369_orange, SICPKA20G0370_pink, SICPKA20G0372_orange, SICPKA20G0374_orange, SICPKA20G0375_yellow, SICPKA20G0376_orange, SICPKA20G0377_orange, SICPKA20G0379_orange, SICPKA20G0380_orange, SICPKA20G0381_yellow, SICPKA20G0383_pink, SICPKA20G0432_yellow, SICPKA20G0433_pink, SICPKA20G0434_yellow, SICPKA20G0435_orange, SICPKA20G0436_pink, SICPKA60G0242_brown, SICPKA60G0244_brown, SICPKA60G0245_brown, SICPKA60G0248_brown, SICPKA60G0249_red, SICPKA60G0251_brown, SICPKA60G0252_brown, SICPKA60G0253_pink, SICPKA60G0256_brown, SICPKA60G0257_brown, SICPKA60G0258_red, SICPKA60G0259_brown, SICPKA60G0338_brown, SICPKA60G0339_brown, SICPKA60G0340_brown, SICPKA60G0341_brown, SICPKA60G0342_brown, SICPKA60G0343_brown, SICPKA60G0344_brown, SICPKA60G0345_red, SICPKA60G0347_brown, SICPKA60G0348_brown, SICSNA20G0112_yellow, SICSNA20G0113_yellow, SICSNA20G0114_yellow, SICSNA20G0115_pink, SICSNA40G0021_pink, SICSNA40G0022_pink, SICSNA40G0023_pink, SICSNA40G0024_orange, SICSNA40G0025_pink, SICSNA40G0026_pink, SICSNA40G0027_pink, SICSNA40G0028_pink, SICSNA40G0033_pink, SICSNA40G0034_pink, SICSNA40G0096_pink, SICSNA40G0097_pink, SICSNA40G0098_pink, SICSNA40G0099_pink, SICSNA40G0101_pink, SICSNA40G0102_pink, SICSNA40G0103_pink, SICSNA40G0104_pink, SICSNA40G0105_pink, SICSNA40G0106_pink, SICSNA40G0107_pink, SICSNA60G0003_brown, SICSNA60G0004_brown, SICSNA60G0006_brown, SICSNA60G0007_brown, SICSNA60G0009_brown, SICSNA60G0010_brown, SICSNA60G0011_brown, SICSNA60G0012_brown, SICSNA60G0013_red, SICSNA60G0014_red, SICSNA60G0015_brown, SICSNA60G0016_brown, SICSNA60G0017_brown, SICSNA60G0018_brown, SICSNA60G0019_brown, SICSNA60G0020_red, SICSNA60G0085_brown, SICSNA60G0087_brown, MCCSNA05G0050_green, MCCSNA05G0120_green, SICPKA20G0309_orange
Rasterizing (5000x1155 px): 100%|████████████████████████████████████████████████████████| 100/100 [00:03<00:00, 29.98it/s]
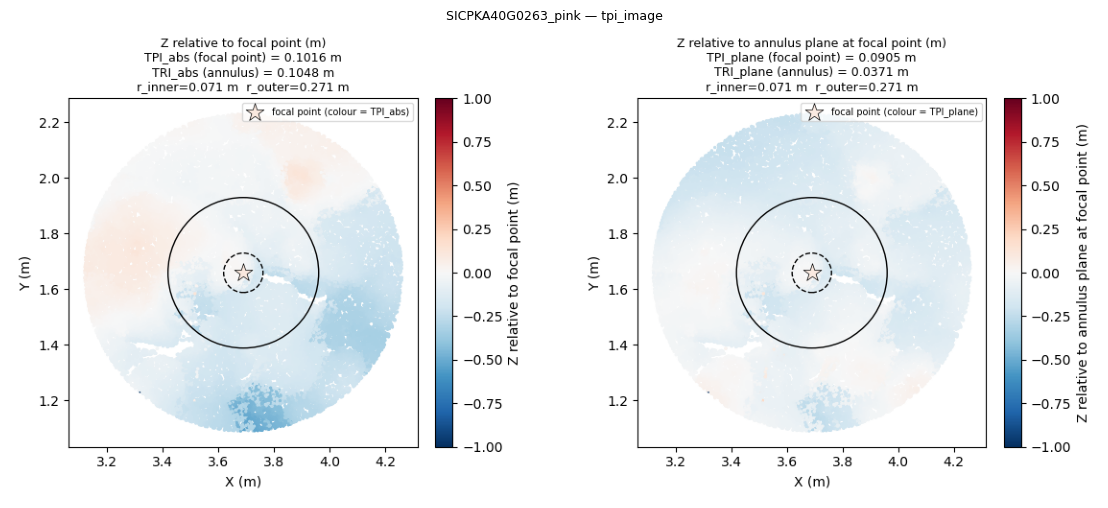
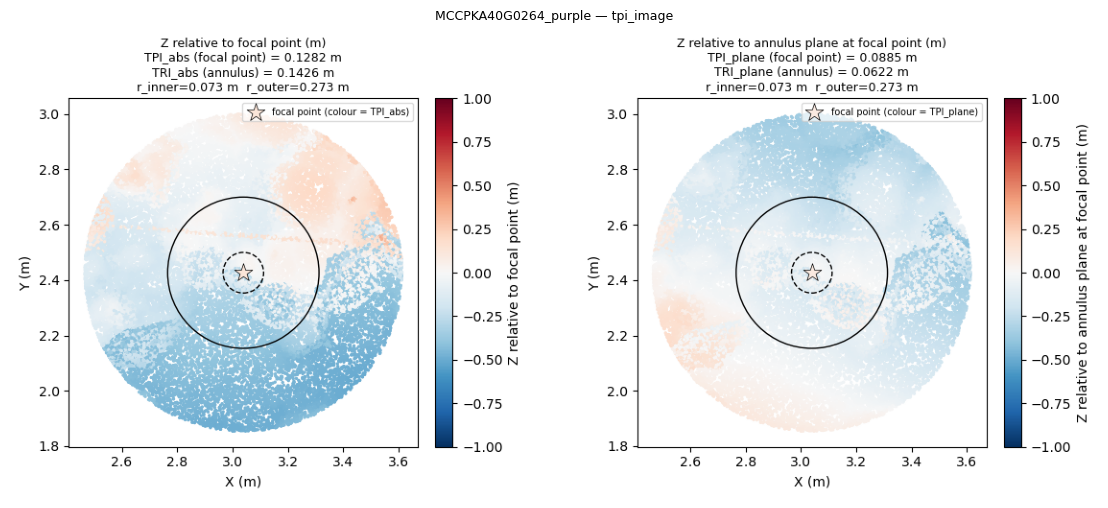
Calculate and visualize topographic position index (TPI) and terrain ruggedness index (TRI)
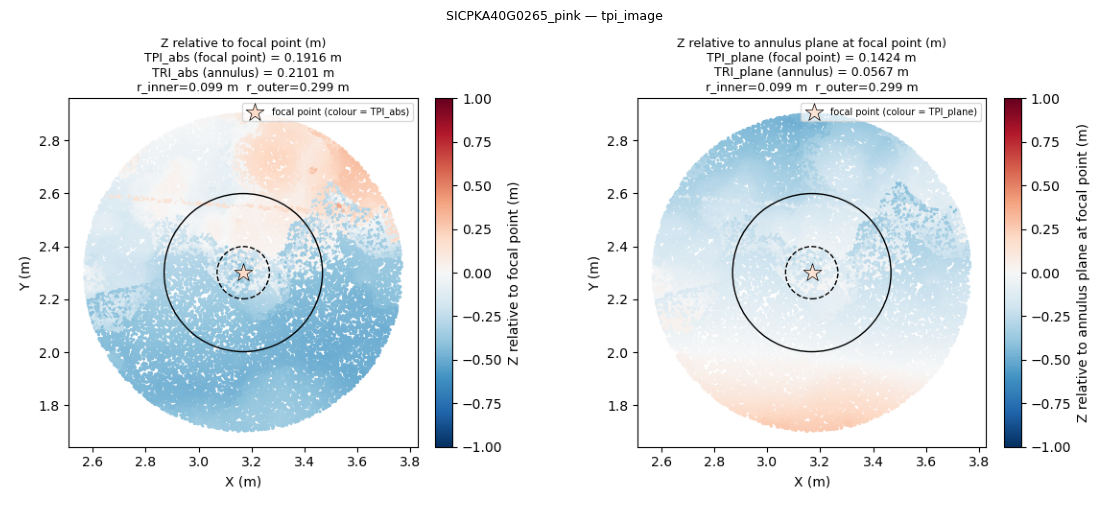
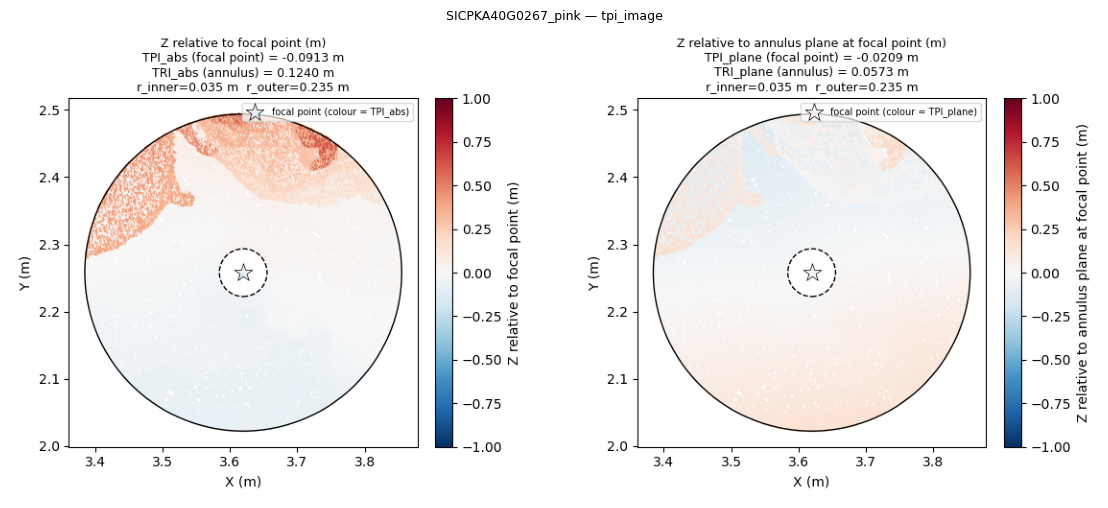
The topographic position index (TPI) is a metric of slope position, described in Weiss (2001), that corresponds to the difference of the elevation of a central pixel with the average of that of neighbouring pixels. (source: xDEM). In this implementation, the “central point” is the annotation point with the elevation defined by the z-coordinate (or by the mean z of points within an “inner radius” around the central point), the neighboring points are sampled from an annulus around the inner circle (so that the focal object is excluded). In addition to the absolute value, a slope-correcting measure (TPI_plane) is also returned representing the signed perpendicular distance of the center point to the best-fit plane of the annulus points.
The terrain ruggedness index (TRI) is a metric of terrain ruggedness, based on cumulated differences in elevation between a central pixel and its surroundings. For bathymetry, the method of Wilson et al. (2007) is generally used, where the TRI is defined by the mean absolute difference with neighbouring pixels. (source: xDEM. In this implementation, it calculates the mean absolute z-difference between the “central point” and all annulus points. In addition, a slope-correcting measure (TRI_plane) is also returned, based on the mean absolute perpendicular distance of annulus points from the best-fit plane.
# Calculate TPI and TRI for the first 5 annotations
annotations = plot.annotations.subset(5)
annotations.get_first_image_matches(plot.cams)
# Sample point cloud around annotations with 0.5m cylinder radius buffer (= beyond the colony radius)
annotations.get_radius_from_2D_surface_area()
annotations.get_point_cloud_by_radius(plot.pcd, cylinder=True, radius_buffer=0.5)
# Calculate microhabitat measurements (using a custom radius for each colony and considering
# a 0.2m annulus neighborhood around the colony
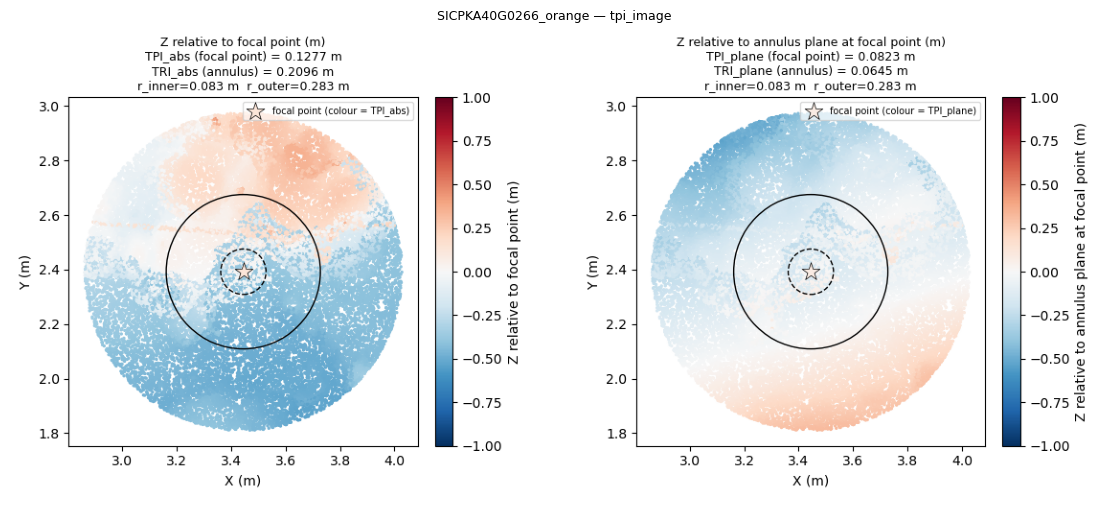
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.2)
for ann in annotations:
ann.show_measurement_images()
# Output measurement visualizations to PDF (with ortho and images/crops)
visualizations.save_measurement_visualizations_to_pdf(annotations,
'/home/pimbongaerts/Github/substrata/docs/notebooks/tpi_report.pdf',
orthomap=ortho)
Annotations 'up_vector' and/or depth_offset not set
Created circular mask 1: radius 0.0709 m
Center: (6219, 3254), radius: 346 px
Mask area: 376081 pixels = 0.0158 m²
Rasterizing (447x447 px): 100%|███████████████████████████████████████████████████████| 101/101 [00:00<00:00, 13732.65it/s]
Annotations 'up_vector' and/or depth_offset not set
Created circular mask 1: radius 0.0734 m
Center: (5767, 3075), radius: 430 px
Mask area: 580833 pixels = 0.0169 m²
Rasterizing (447x447 px): 100%|████████████████████████████████████████████████████████| 101/101 [00:00<00:00, 9647.57it/s]
Annotations 'up_vector' and/or depth_offset not set
Created circular mask 1: radius 0.0988 m
Center: (2917, 2855), radius: 515 px
Mask area: 833189 pixels = 0.0307 m²
Rasterizing (447x447 px): 100%|████████████████████████████████████████████████████████| 101/101 [00:00<00:00, 9677.32it/s]
Annotations 'up_vector' and/or depth_offset not set
Created circular mask 1: radius 0.0833 m
Center: (3272, 3456), radius: 389 px
Mask area: 475337 pixels = 0.0218 m²
Rasterizing (447x447 px): 100%|████████████████████████████████████████████████████████| 101/101 [00:00<00:00, 9386.76it/s]
Annotations 'up_vector' and/or depth_offset not set
Created circular mask 1: radius 0.0355 m
Center: (4767, 2904), radius: 145 px
Mask area: 66045 pixels = 0.0039 m²
Rasterizing (447x447 px): 100%|███████████████████████████████████████████████████████| 101/101 [00:00<00:00, 10460.64it/s]
Different parameter options
# Calculate TPI and TRI for the first 5 annotations
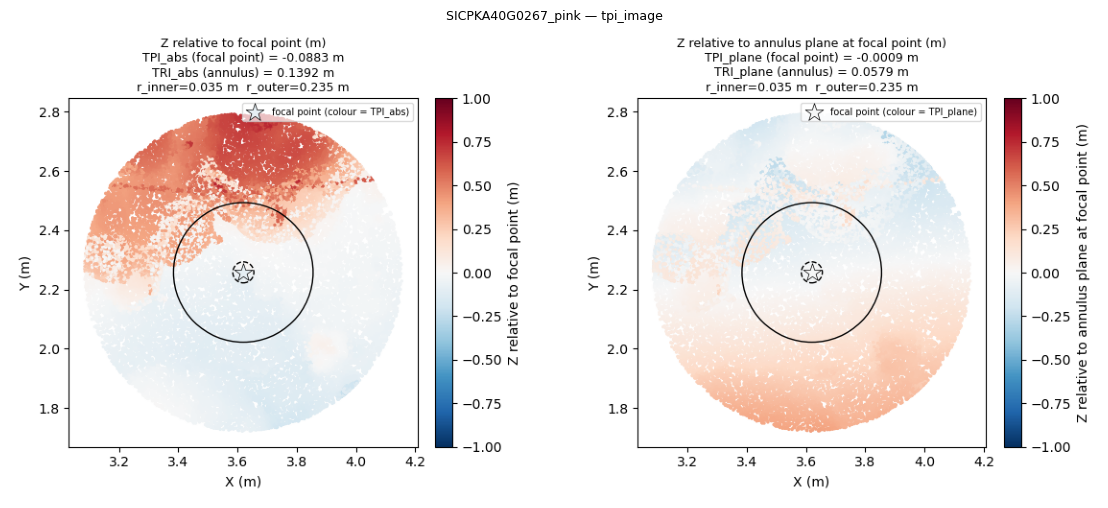
example_annotation = plot.annotations['SICPKA40G0267_pink']
example_annotation.get_first_image_match(plot.cams)
# Sample point cloud around annotations with 0.5m cylinder radius buffer (= beyond the colony radius)
example_annotation.get_radius_from_2D_surface_area()
example_annotation.get_point_cloud_by_radius(plot.pcd, cylinder=True, radius_buffer=0.5)
# Calculate microhabitat measurements (using a custom radius for each colony and considering
# a 0.1m annulus neighborhood around the colony)
example_annotation.measure(calc_tpi_and_tri, annulus_width=0.1)
example_annotation.show_measurement_images()
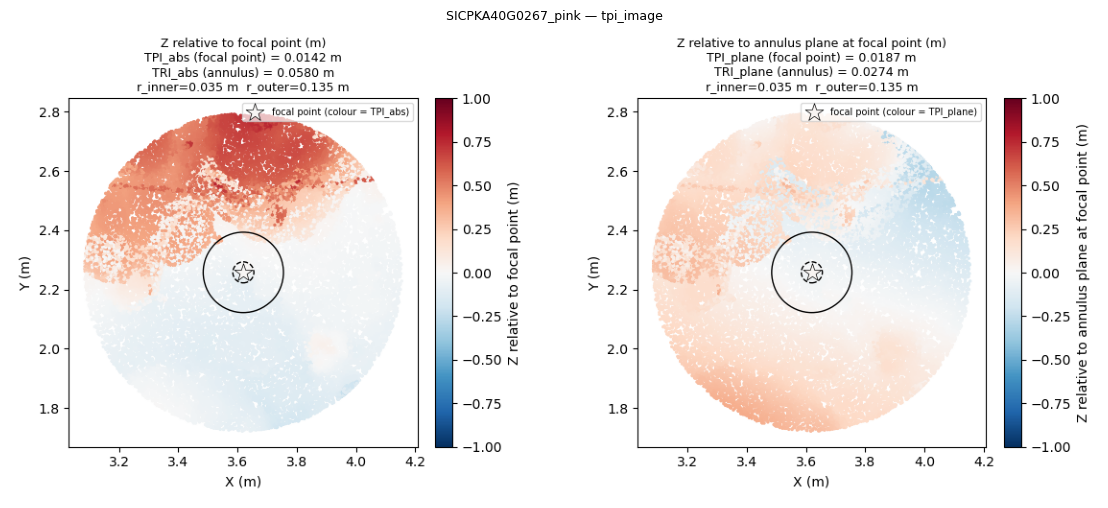
# Using a wider annulus and using the the mean z of the inner radius
# (rather than the z-coordinate of the annotation directly)
example_annotation.measure(calc_tpi_and_tri, annulus_width=0.4, center_z_from_inner = True)
example_annotation.show_measurement_images()
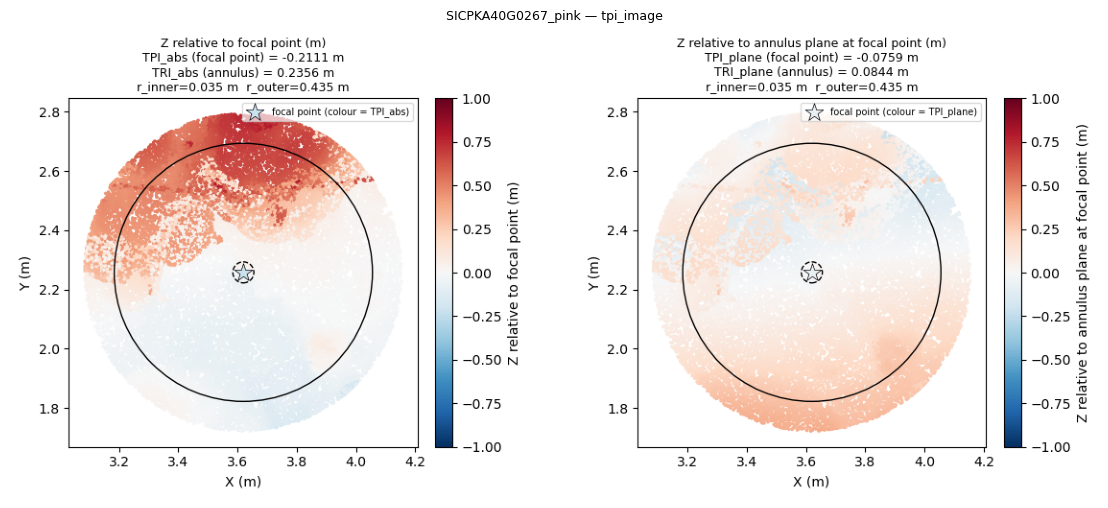
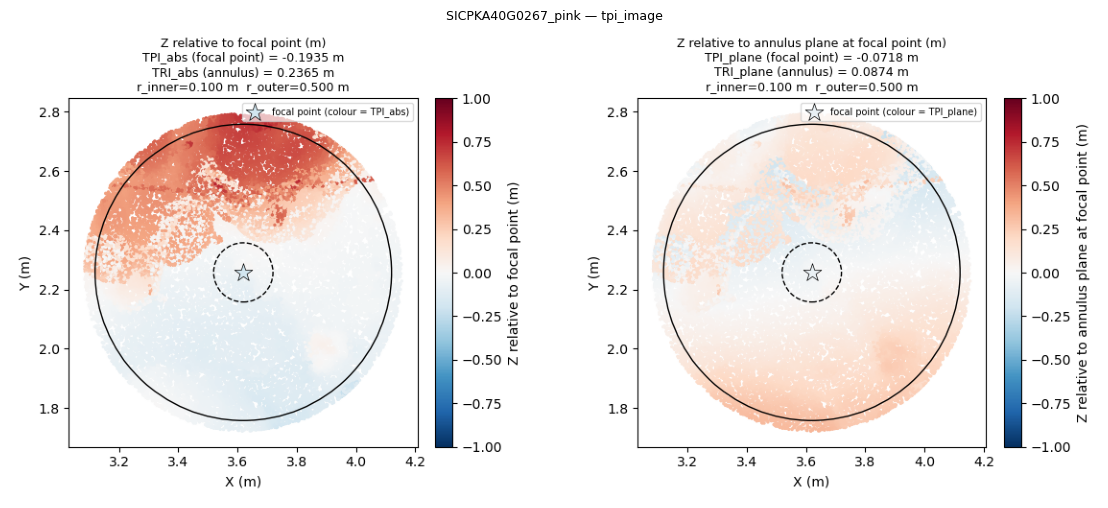
# The TPI and TRI can also be calculated with a fixed inner and outer radius
example_annotation.measure(calc_tpi_and_tri, radius_inner=0.1, radius_outer=0.5)
example_annotation.show_measurement_images()
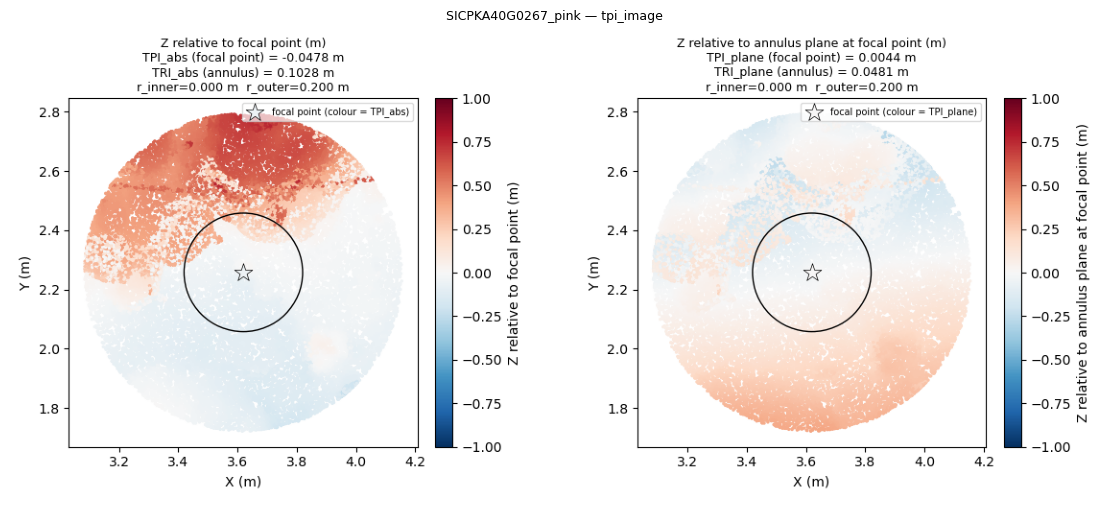
# Or the colony can be included in the measurement (no annulus)
example_annotation.measure(calc_tpi_and_tri, radius_inner=0, radius_outer=0.2)
example_annotation.show_measurement_images()
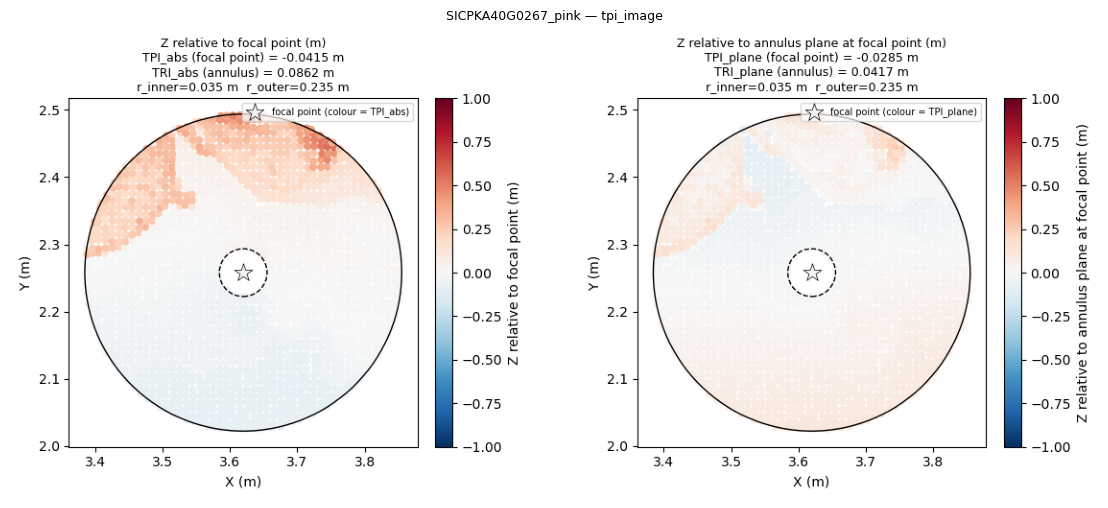
# It can also rasterize the XY space to avoid biases due to varying point densities
# (with the mean z value used for each raster cell - the rasterization is also used for calculating
# the mean z of the inner radius)
example_annotation.measure(calc_tpi_and_tri, annulus_width=0.2, center_z_from_inner = True,
raster_cell_size = 0.01)
example_annotation.show_measurement_images()
# Fine rasterization
example_annotation.measure(calc_tpi_and_tri, annulus_width=0.2, center_z_from_inner = True,
raster_cell_size = 0.001)
example_annotation.show_measurement_images()
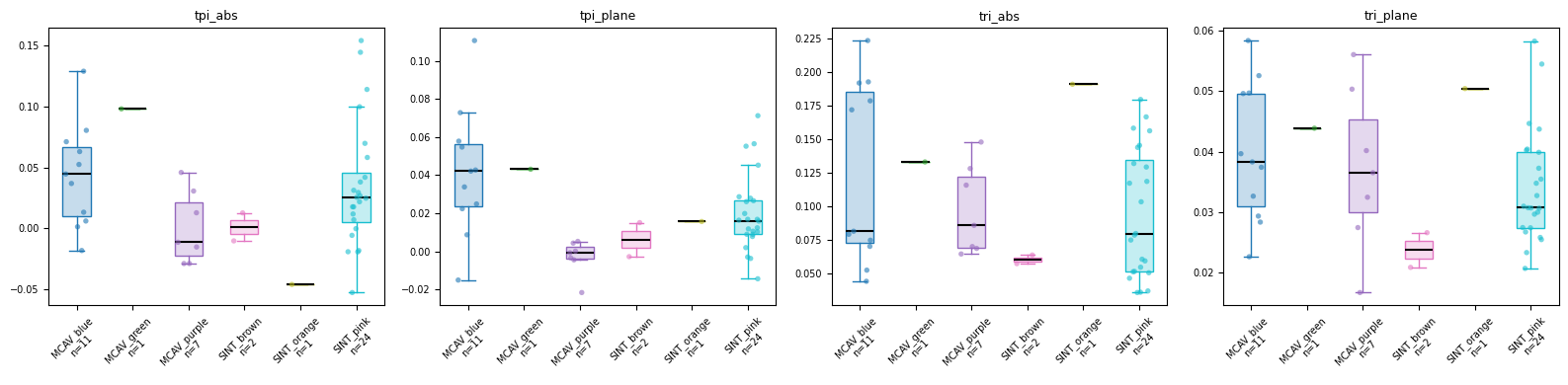
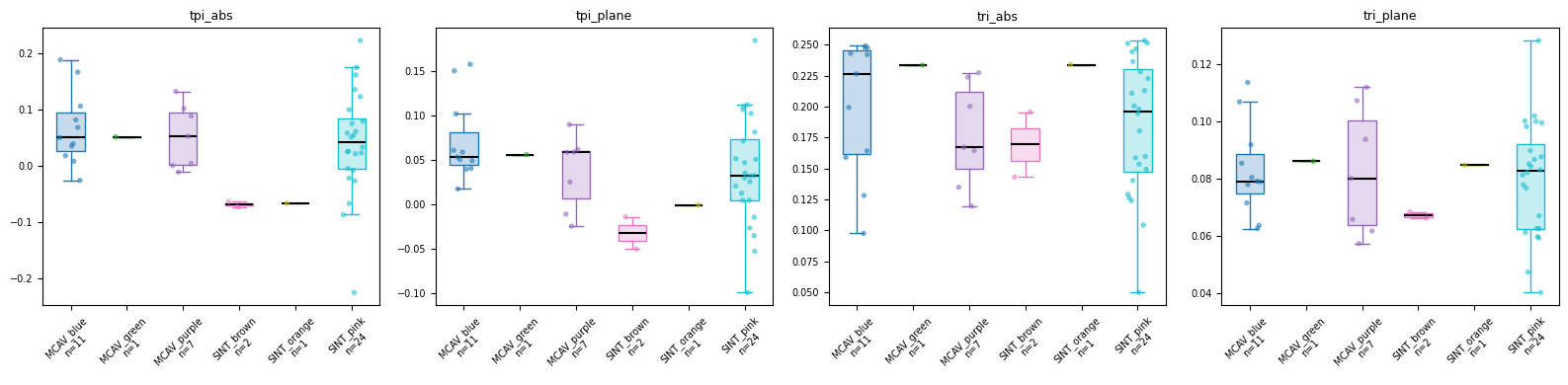
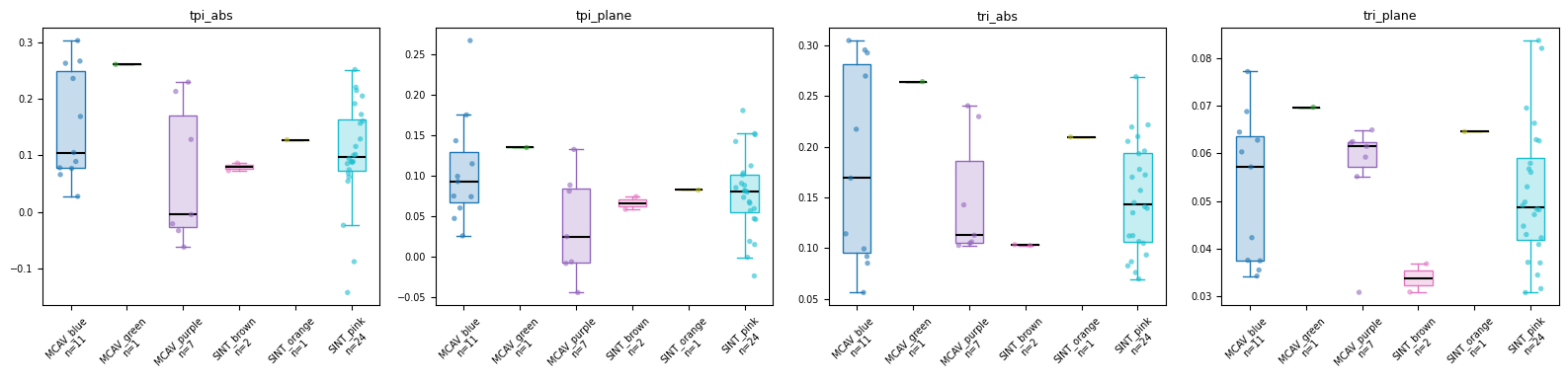
Comparison of different parameter options - different neighborhood size (=annulus width)
# Calculate across all annotations in plot
annotations = plot.annotations
# Sample point cloud around annotations with 0.7m cylinder radius
annotations.get_radius_from_2D_surface_area()
annotations.get_point_cloud_by_radius(plot.pcd, cylinder=True, radius_buffer=0.7)
# Calculate microhabitat measurements
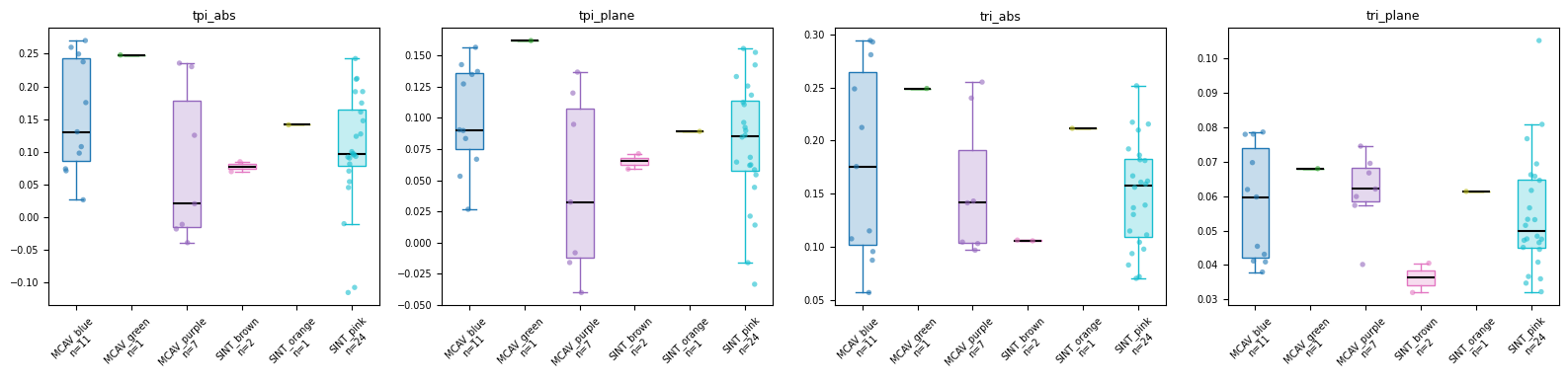
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.2, center_z_from_inner=True)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
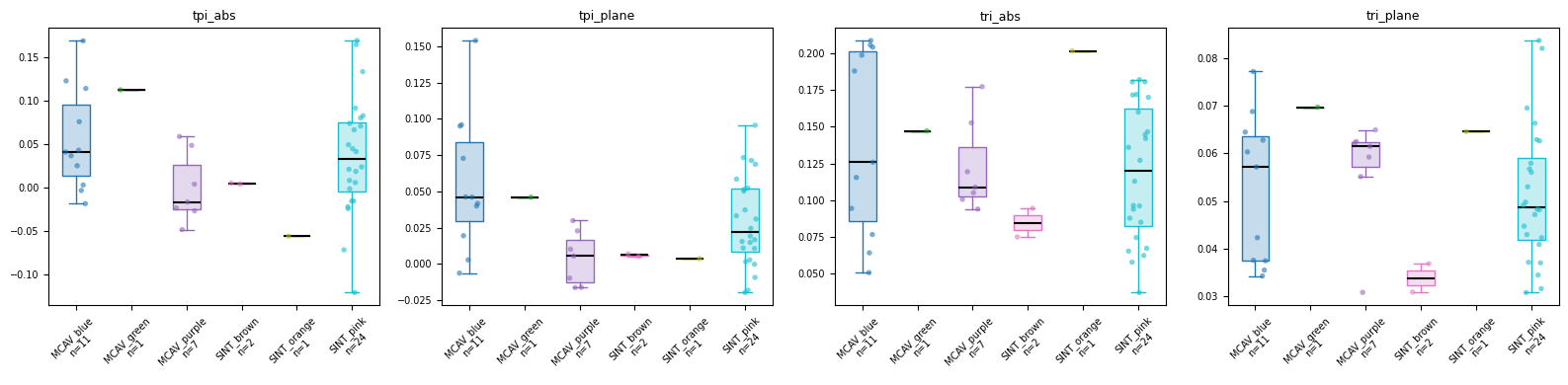
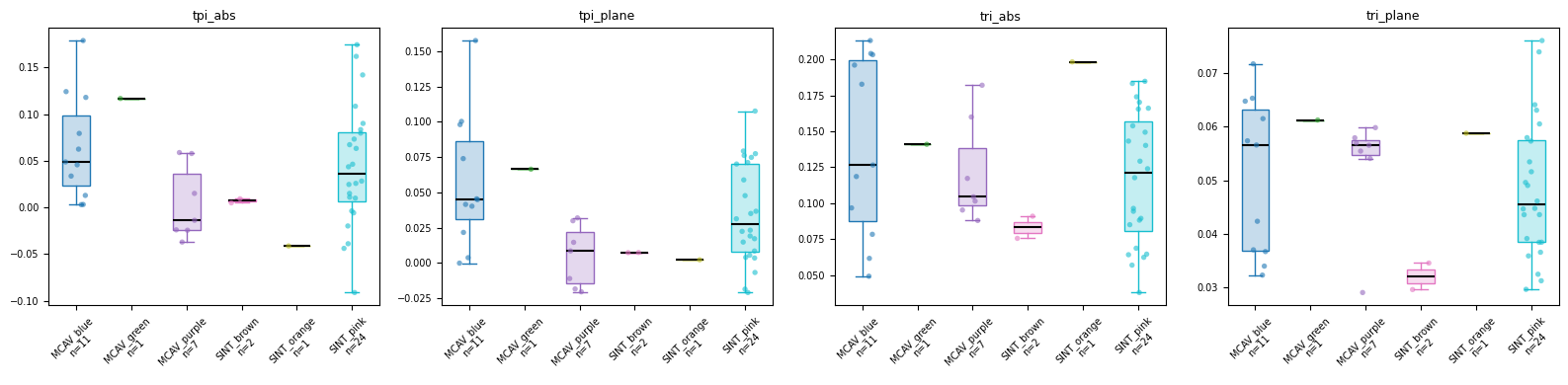
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.1, center_z_from_inner=True)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
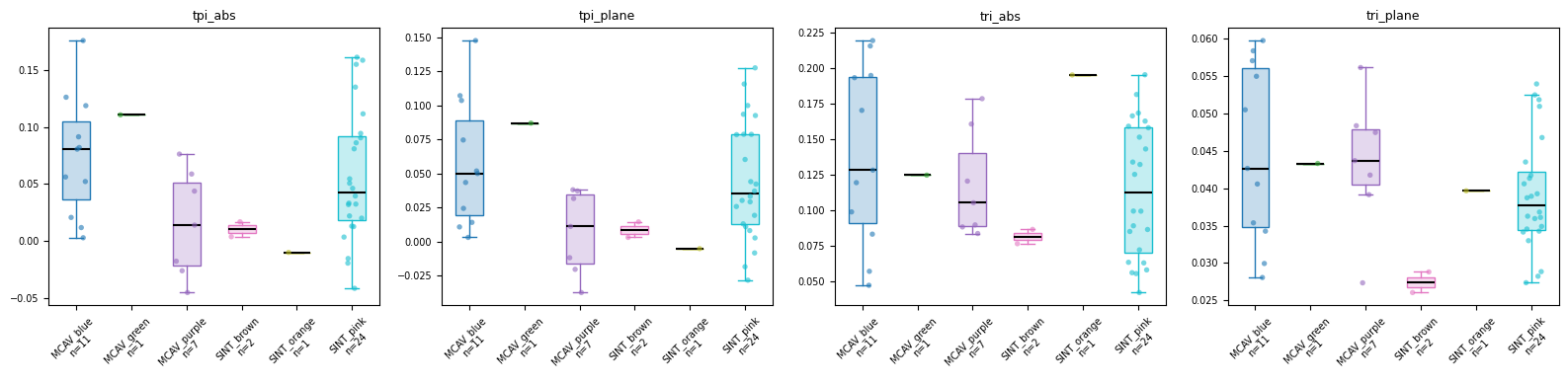
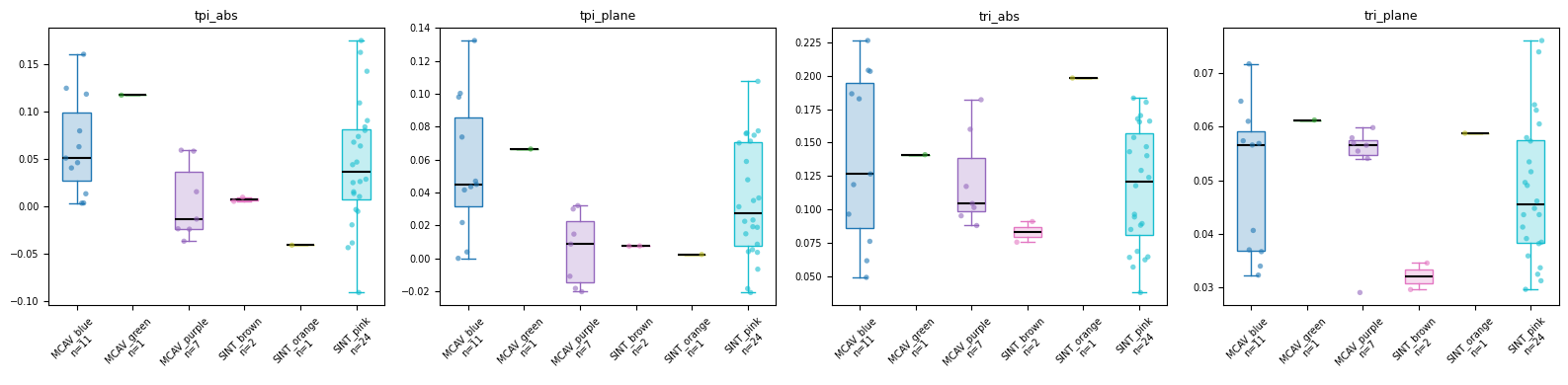
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.5, center_z_from_inner=True)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
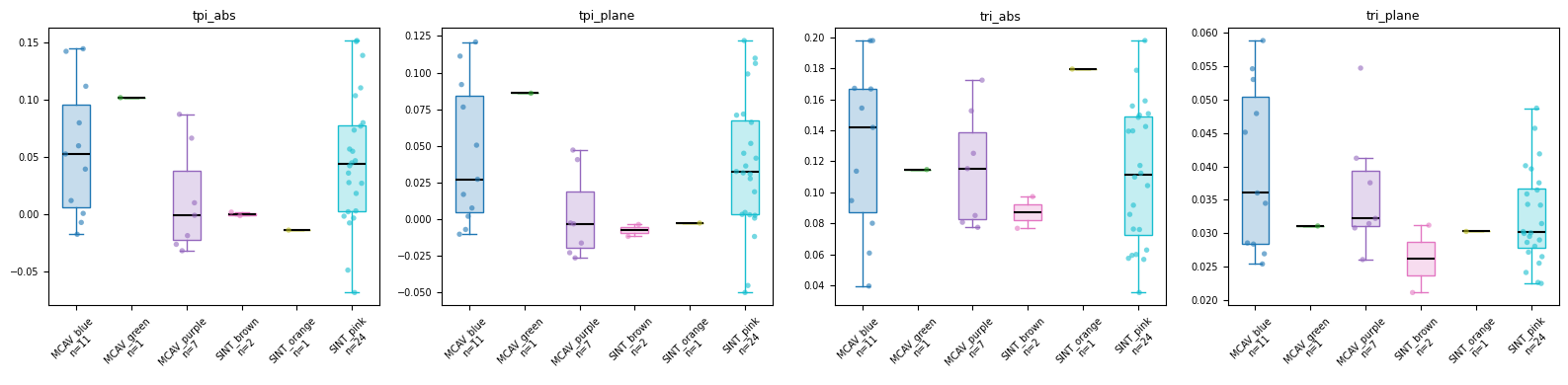
Comparison of different parameter options - z or mean z from inner
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.2, center_z_from_inner=False)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.2, center_z_from_inner=True)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
Comparison of different parameter options - rasterization
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.2, center_z_from_inner=True, raster_cell_size=0.001)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.2, center_z_from_inner=True, raster_cell_size=0.01)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.2, center_z_from_inner=True, raster_cell_size=0.1)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
Comparison of different parameter options - with or without coral colony
annotations.measure_all("calc_tpi_and_tri", radius_inner=0, radius_outer=0.3, raster_cell_size=0.001)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
annotations.measure_all("calc_tpi_and_tri", annulus_width=0.2, center_z_from_inner=True, raster_cell_size=0.001)
fig = visualizations.plot_measurements(annotations, measurements=["tpi_abs", "tpi_plane", "tri_abs", "tri_plane"])
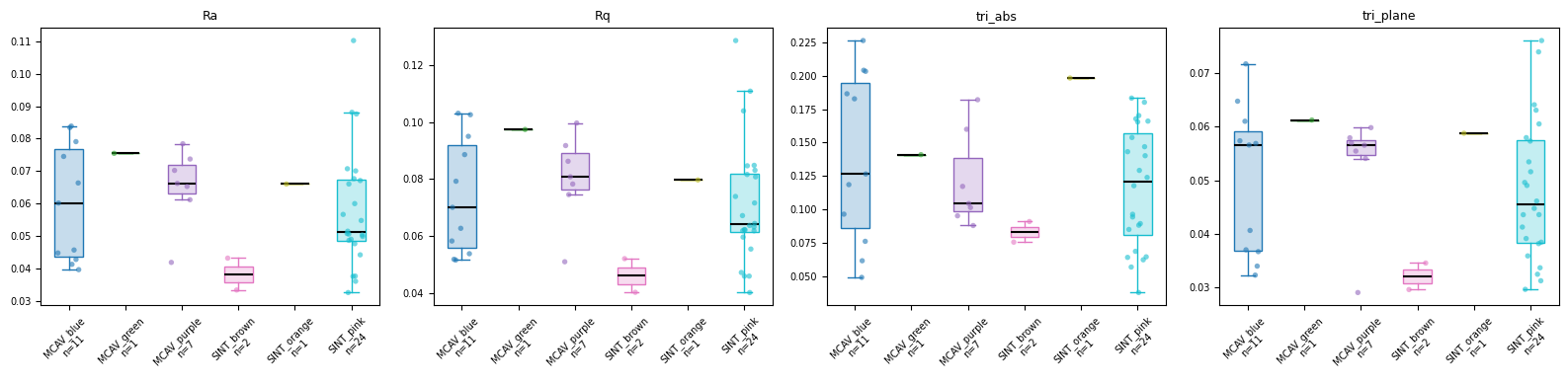
Comparison with roughness parameter
# Using a 0.3m radius for Ra to be comparable to annulus_width=0.2 + avg colony size
annotations.get_point_cloud_by_radius(plot.pcd, cylinder=True, radius=0.3)
annotations.measure_all("calc_roughness")
fig = visualizations.plot_measurements(annotations, measurements=["Ra", "Rq", "tri_abs", "tri_plane"])